Abstract
Although commercial and open-source software exist to reconstruct a static object from a sequence recorded with an RGB-D sensor, there is a lack of tools that build rigged models of articulated objects that deform realistically and can be used for tracking or animation.
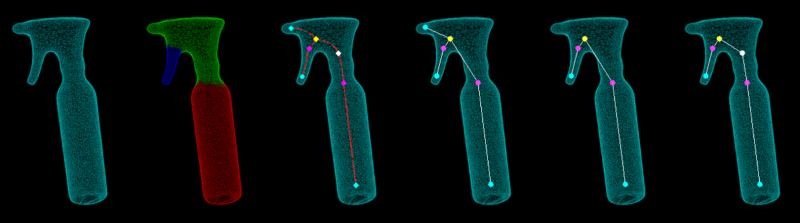
In this work, we fill this gap and propose a method that creates a fully rigged model of an articulated object from depth data of a single sensor.
To this end, we combine deformable mesh tracking, motion segmentation based on spectral clustering and skeletonization based on mean curvature flow.
The fully rigged model then consists of a watertight mesh, embedded skeleton, and skinning weights.
Publications
Tzionas, D., and Gall, J.
Reconstructing Articulated Rigged Models from RGB-D Videos
European Conference on Computer Vision Workshops 2016 (ECCVW'16)
Workshop on Recovering 6D Object Pose (R6D'16)
[pdf] [suppl] [BibTex] [video] [poster/ppt]
Reconstructing Articulated Rigged Models from RGB-D Videos
European Conference on Computer Vision Workshops 2016 (ECCVW'16)
Workshop on Recovering 6D Object Pose (R6D'16)
[pdf] [suppl] [BibTex] [video] [poster/ppt]
Videos
YouTube
Datasets
 |
Spray | [Frames] [Preview] [INput Model] [Deform. MoCap] [OUTput Artic. Model] [Videos_In/Out] | |
 |
Donkey | [Frames] [Preview] [INput Model] [Deform. MoCap] [OUTput Artic. Model] [Videos_In/Out] | |
 |
Lamp | [Frames] [Preview] [INput Model] [Deform. MoCap] [OUTput Artic. Model] [Videos_In/Out] | |
 |
Pipe 1/2 | [Frames] [Preview] [INput Model] [Deform. MoCap] [OUTput Artic. Model] [Videos_In/Out] | |
 |
Pipe 3/4 |
[Frames] [Preview] [INput Model] [Deform. MoCap] [OUTput Artic. Model] [Videos_In/Out] | |
 |
IJCV Pipe |
[Frames] [Preview] [INput Model] [Deform. MoCap] [OUTput Artic. Model] [Videos_In/Out] | |
 |
IJCV Rope |
[Frames] [Preview] [INput Model] [Deform. MoCap] [OUTput Artic. Model] [Videos_In/Out] | |
 |
Camera Parameters |
[Camera] | |
| |
Meshes (only .OFF) |
[Spray] [Donkey] [Lamp] [Pipe12] [Pipe34] [IJCV-Pipe] [IJCV-Rope] |
Related Projects
Capturing Hands in Action using Discriminative Salient Points and Physics Simulation, IJCV 2016 [Web]
Citation
If you find the material in this website useful for your academic work, please cite this work.
Contact
If you have general questions/comments concerning the paper or the website, please contact Dimitrios Tzionas

