Capturing Hand Motion with an RGB-D Sensor, Fusing a Generative Model with Salient Points
Dimitrios Tzionas and Abhilash Srikantha and Pablo Aponte and Juergen Gall----> Extended IJCV version of the project here <----
(accepted on 10.02.2016)
Abstract
Hand
motion capture has been an active research topic in recent years,
following the success of full-body pose tracking. Despite similarities,
hand tracking proves to be more challenging, characterized by a higher
dimensionality, severe occlusions and self-similarity between fingers.
For this reason, most approaches rely on strong assumptions, like hands
in isolation or expensive multi-camera systems, that limit the
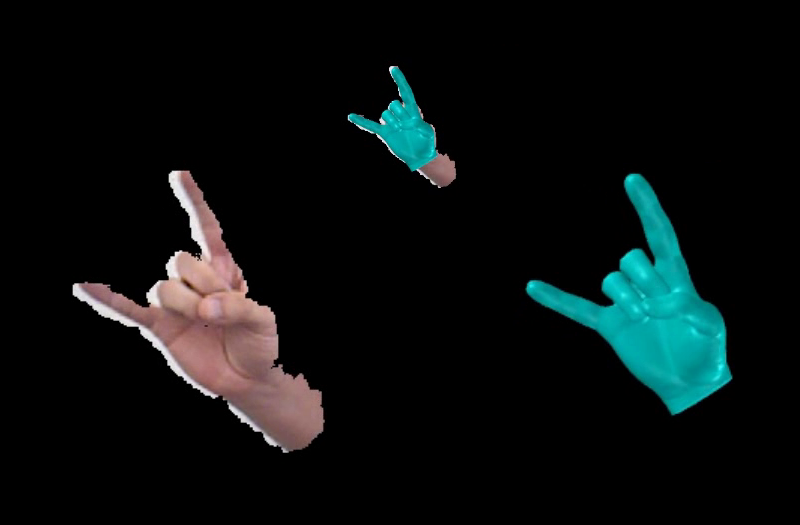
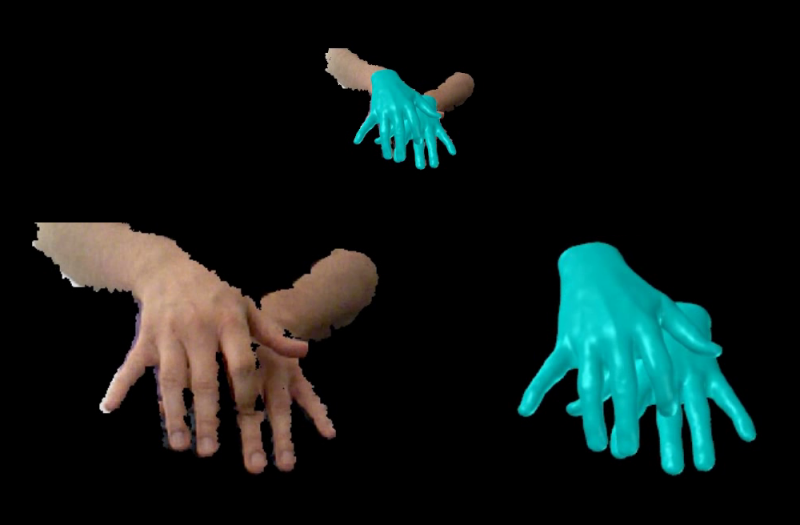
practical use. In this work, we propose a framework for hand tracking
that can capture the motion of two interacting hands using only a
single, inexpensive RGB-D camera. Our approach combines a generative
model with collision detection and discriminatively learned salient
points. We quantitatively evaluate our approach on 14 new sequences
with challenging interactions.
Publications
Tzionas,
D., Srikantha, A., Aponte, P. and Gall, J.
Capturing Hand Motion with an RGB-D Sensor, Fusing a Generative Model with Salient Points (PDF, BibTex)
German Conference on Pattern Recognition (GCPR'14)
Supplementary Material: Capturing Hand Motion with an RGB-D Sensor, Fusing a Generative Model with Salient Points (PDF, Files)
Capturing Hand Motion with an RGB-D Sensor, Fusing a Generative Model with Salient Points (PDF, BibTex)
German Conference on Pattern Recognition (GCPR'14)
Supplementary Material: Capturing Hand Motion with an RGB-D Sensor, Fusing a Generative Model with Salient Points (PDF, Files)
Video
| YouTube | (up to 1080p resolution) |
| 1280x960 px | (44.3 MB) |
Data

















Sequences marked with (*) are used just for comparison with the FORTH tracker.
Model-files marked with (**) do not contain sequence-specific files (.SKEL and .MOTION)
Presentation
| PPT | (124.0 mb) |
presentation ppt |
| PPT extraSlides | (161.0 mb) |
contains back-up slides for the Q&A section
|
Related projects
A Comparison of Directional Distances for Hand Pose Estimation, GCPR 2013. Link
Citation
If you find the material in this website useful for your academic work, please cite this work.
Contact
If
you have questions concerning the data, please contact me